|
『科学談話室』の話題より | ||
| [danwa:0367] ロボット | |
| Date:Wed, 22 Nov 2000 23:56:42 | From: 長谷川 |
|
談話室のみなさん、こんばんは、長谷川です。 先日、ソニーから第2世代のAIBOが発売(注文受付)されましたね。 また、ホンダが2足歩行ロボットP3の小型版で、身長120cm、体重43kg の「ASIMO」を発表したかと思えば、ソニーもAIBOの人間型というよ うなロボットを発表して、ずいぶんとロボットの話題が多いですね。 そんな中、11月24日(金)・25日(土)・26日(日)に横浜で ROBODEX2000 という ロボットの博覧会が開かれます(http://www.robodex.org)。見に行ってきます ので、帰ってきたらまた報告します。 | |
| [danwa:0368] Re: ロボット | |
| Date:Wed, 29 Nov 2000 23:56:25 | From: 長谷川 |
|
談話室のみなさん、こんばんは。長谷川です。 報告が遅れていますが、24日(金)に ROBODEX2000 に行ってきました。金曜 日だというのにすごい人出で、やはり人気はホンダとソニーがダントツでした。 ホンダが先日発表したASIMOですが、実にかわいいですね。動きはP3よ りもさらになめらかで、歩くスピードをだんだんゆっくりにして止まる様子は 気持ち悪いほど…。コントロールはファミコンかプレステのコントローラーか と思うようなもので、無線で動かしていました。ただ、P3からのソフトの移 植が不十分なのか、P3が階段を下りて登場したのに対して、ASIMOは平 面しか歩きませんでした。 一方のソニーも先日発表したSDR3Xのデモがすごい人気でした。AIBO の胴体を人間型に改造して、小型にしたホンダのP2の足を取りつけた様でし た。本当にP2の足そっくりだったのは、人間の動きを再現するための必然か それとも…。 写真も撮ってきましたので、近日中にWebの方で公開します。 | |
| [danwa:0370] Re: ロボット | |
| Date:Sun, 3 Dec 2000 17:32:02 | From: 長谷川 |
|
談話室のみなさん、こんにちは。長谷川です。 先日の ROBODEX2000 ではなく、夏に東京で行なわれた「21世紀夢の技術展」 というのでも出展されていたものですが、ホンダの2足歩行ロボットの第1作の E0と、人間型の第1作P1のデータと写真を、とりあえず Web に載せました。 「科学あれこれ」の 「その他の話題」にあります。 P1は、発表モデルのP2と違ってメカ剥き出しなのがいい。P2も好きだけ ど…。 | |
| [danwa:0371] Re: ロボット(ロボットの関節モーターの仕組みは?) | |
| Date:Mon, 4 Dec 2000 02:05:19 | From: 浦田 |
|
長谷川さん、みなさん、こんばんわ。浦田です。 長谷川さん、テレビで見る限りロボットの関節アクチュエーターとても小さいも のでした。無理な力がかかっても、スリップしてギアが壊れないようになってい るのでしょうか。ギアも無い新しい技術を使っているのでしょうか? 私の予想では長いネジとナットの組み合わせで伸縮していると思っているのです が。これならかなり頑丈です。 よろしくお願いします。 | |
| [danwa:0373] Re: ロボット | |||
| Date:Wed, 6 Dec 2000 13:18:00 | From: 長谷川 | ||
|
浦田さん、談話室のみなさん、こんにちは。長谷川です。 浦田さん [danwa:0371]
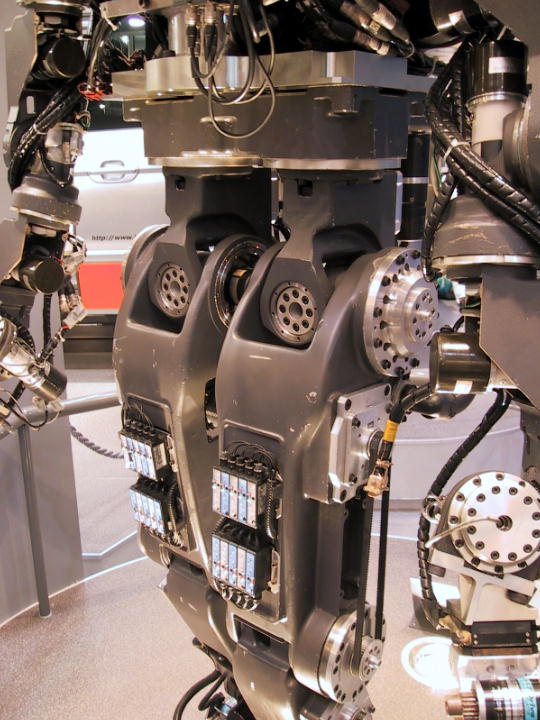 P1の太ももからひざの拡大写真 ハーモニックドライブ減速機というのがどういうものか知らないのですが、太 もものモーターをベルト駆動でひざの関節の位置まで動きを伝え、そのベルト がかかっているのが減速機ではないでしょうか。 ともかく、モーターの位置をずらすことによって、関節部分を小さくしている ようですね。 P2は、 このモーターからの駆動ベルトの部分に青 いカバーをかけて、P2独特のあのデザインになっていますね。 それから、圧感のセンサーが取りつけてあるので、センサーからの情報をモー ターの動きにうまくフィードバックできれば、スリップしなくてもいいのでは ないでしょうか。
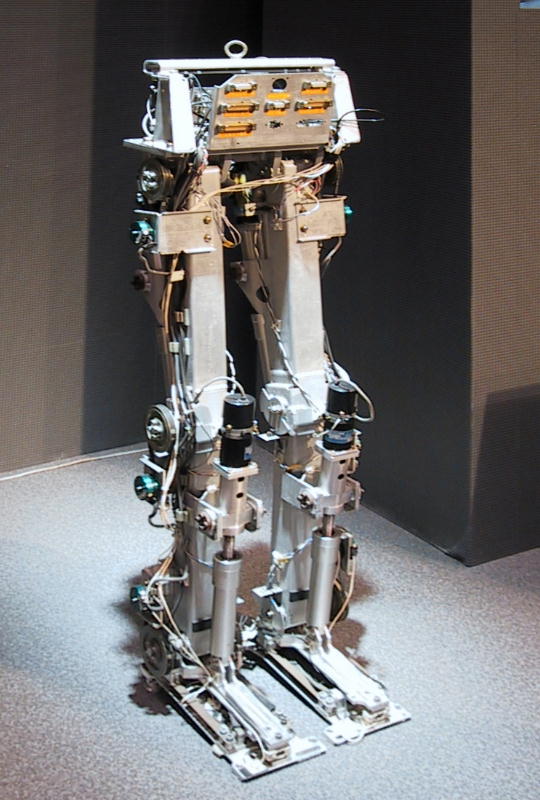 2足歩行ロボット初期のE0 | |||
| [danwa:0381] Re: ロボット(ロボットの使い方) | |
| Date:Sun, 17 Dec 2000 01:02:40 | From: 浦田 |
|
みなさん、再びこんばんわ、浦田です。 今日、 大阪市立科学館の友の会 例会に 出席させていただきました。長谷川さんの ロボットのビデオを見せていただきました。使い方を考えてみました。
これを思い出すとなぜか笑ってしまいます。 | |
| [danwa:0384] Re: ロボット | |||
| Date: Mon, 18 Dec 2000 13:27:46 | From: のりこ | ||
|
こんにちは 談話室のみなさま。 のりこです。 件名 : [danwa:0368] Re: ロボット
良かった。(^^) 浦田さん こんにちは。 件名 : [danwa:0381] Re:ロボット(ロボットの使い方)
私のまわり人たちもビデオを見ながら考えていましたよ。 宇宙服を着た人間が動いているようだねって言っていたのです。 私はロボットを見ていてね、 人間の動きというのは単純な直線運動なのかなぁって思いました。 人間の骨って直線ぽいですしどうなんでしょう。 骨の大小が組み合わさって動いているのかなって。 ロボットがより人間の動作に似た動きをして、階段を下りたり上ったり しているなんて感動ですよね。 そばで見たら絶対触ってしまうでしょうね。 うん。(^−^) ビデオのロボットはかわいいかった! 鉄腕アトムのようなロボットがほしい。 | |||
| [danwa:0387] Re: ロボット(ハーモニックギア) | |
| Date:Fri, 22 Dec 2000 12:43:44 | From: 浦田 |
|
談話室のみなさん、こんにちは、浦田です。 長谷川さん、ロボット各部の鮮明な写真( E0,P1) とても興味深く見せていただきました。 生意気ですが、ああ!なるほど!そうすればいいのか!と思った所を一つだけ。 P1の膝関節にはギア部分だけ捕り付け、モーターを太ももに付けてタイミング ベルトでつないでいる。 メリット
ハーモニックギアのケースと出力軸を関節とするP1は外骨格型ロボットと勝手 に分類しちゃいました。! 関節が瞬間的にスリップしたら、倒れますよね。やっぱり長谷川さんの言われ たように、圧感センサが限界を示したら素早くバランスをとりながら引き下がる ほうが人間らしく行動できそうですね。 長谷川さん、これら関節には、最近流行りのPICマイコン(1cm角)等がつ いているのでしょうか。それとも、一つのコンピューターが全ての関節をコント ロールしているのでしょうか? 各関節にPICを付けて、パソコン画面上にマウスで動きカーブを描いて、走る までやってみたいですね。 引き続き、写真とにらめっこします。 ハーモニックギアについて少し書きます。まちがってたらどなたか訂正してくだ さい。 実験かイメージしてください。 紙コップ(変形できることが大切)を、口の広さが紙コップより少し広く硬い コップに入れます。 紙コップが外側のコップとスリップしないように指で押さえながらクルクル回し てください。 指が一回転しても紙コップは二つのコップの円周の差しか回転しません。円周の 差が少ない程減速比が大きくなります。 実際には外のコップと紙コップには歯がついていてスリップしません。そして 指と紙コップはスリップしないといけないので、実際には楕円形のカム外周に肉 薄のボールベアリングがついています。その外が変形する歯(紙コップ)です。 そしてコップの底の中央から出力軸が出ています。楕円形のカムの中央が入力軸 でモーターにつながります。 参考:オリエンタルモーターカタログ2000 | |
| [danwa:0389] Re: ロボット | ||
| Date: Sun, 24 Dec 2000 14:44:51 | From: 長谷川 | |
|
談話室のみなさん、こんにちは。長谷川です。 浦田さん、ハーモニックギアの説明ありがとうございます。 浦田さん [danwa:0387]
P2は集中制御だったのですが、P3は分散型の制御になっています。浦田さ んが書かれたように、関節ごとにマイクロコンピュータが組み込まれているの かもしれません。 でも、分散型制御にするだけで、減量につながるんでしょうか? | ||
| [danwa:0393] Re: ロボット | |
| Date:Tue, 26 Dec 2000 23:52:14 | From: 浦田 |
|
長谷川さん、談話室のみなさん、こんばんわ。 ちょっと実験してみてください。頭を普通に左右左右と5秒毎に振り返りなが ら何か別のことを考えるのは簡単です。しかし、太極拳のように左から右に5秒 かけてゆっくりと振りながら何か別のことを考えるのは少し困難を感じるのでは ないでしょうか? ご存知のとおり、過去の繰り返しによって速度も含めて小脳にパターン化され ていた回路を使えば、大脳は別の刺激に注意を向けることが可能になります。 高速で機能する小脳の神経回路は刺激が次の刺激を呼ぶループ構造になってい て、筋肉内の感覚神経もそのループに入っていると考えたら、コンピュータのプ ログラムに似ています。 ロボットの各関節分散処理、私ならこう設計します。 ロボットの各関節に小脳を持たせる方法。 関節コンピュータは小脳モードと大脳直結モードを切替できるようにしておきま す。 小脳モード 例えば ( )内は繰り返し回数。
大脳モードでは、中央コンピューター(大脳)からのパルスに合わせて各間接が 一ステップずつ動きます。 以上 各関節分散処理がなぜ軽量にするのか・・・思いつくことは・・・。 大きい電流を流すモータードライバとモーターの距離が短くなるので線の本数と 長さが減る。 位置エンコーダとコンピュータの距離が短くてすむ。 関節コンピューターにPICマイコンを使えば数グラム。 メインコンピューターが小さくなる。 二足歩行ロボットの傾きや転倒まで実感できるコントローラーに人間が入れ ば、コンピューターは必要ないし、転倒もこわくなさそうですよね。手さえ壊れ なければ、自分で修理(手術)できる。それは実感できないほうがいいかな。 | |
| ・・・さて、この先 話はどうなるのか?お楽しみに!・・・ | |
| 入室希望の方はこちらへ | 『科学談話室』の話題一覧 |
科学あれこれ
ホームページへ